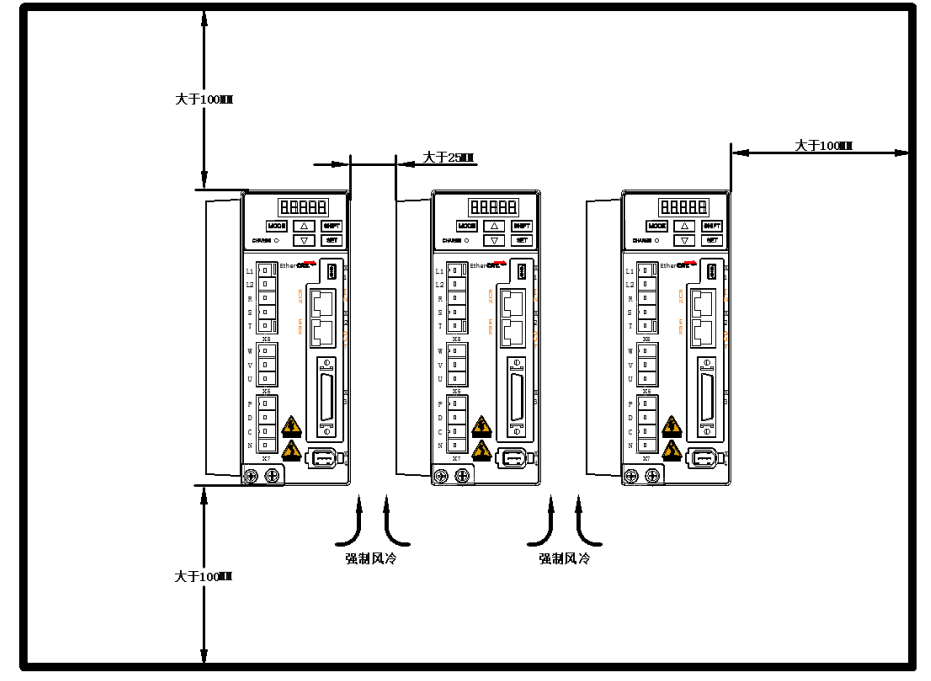
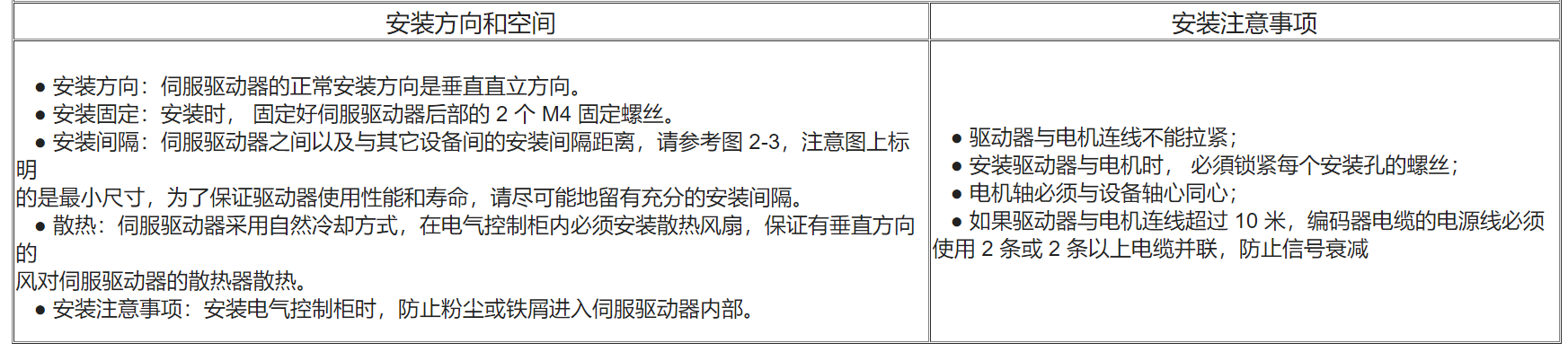
|
|
 |
|
| 使用环境 |
| 温度 |
湿度 |
大气压强 |
| 工作:0℃~40℃ 存贮:-40℃~50℃ |
40% ~ 80%(无结露) |
86~106kPa |
| 控制方式 |
控制模式 |
再生制动 |
| IGBT PWM 控制 |
①位置控制②同步位置模式控制③速度控制④同步速度控制⑤转矩控制⑥同步转矩控制
|
内置/外接 |
| 特性 |
| 速度频率响应 |
速度波动率 |
调速比 |
| 400Hz或更高 |
<±3%额定转速(负载0 ~100%); <±2%额定转速(电 源-15~+10%) |
1:5000 |
|
|
| 输入信号 |
输出信号 |
| 逻辑伺服使能、逻辑报警清除. 逻辑CCW驱动禁止、逻辑CW 驱动禁止、逻辑外部转矩限制使能、逻辑脉冲计数器清零、逻辑脉冲指令禁止、逻辑零速钳位、逻辑模拟量指令取反、逻辑控制信号端子[0]、逻辑控制信号端子[1]、逻辑控制信号端子[2]、 逻相 控制信号端子[3]、逻辑模式切换端子[0]、逻辑模式切换端子[1]. 逻辑模式PID参数切换端子 |
伺服报警、定位完成/速度到达、机械制动器释放 |
| 总线功能 |
适用负载惯量 |
| EtherCAT、CANopen总线功能 |
小于电机惯量的5倍 |
| 监视功能 |
保护功能 |
| 电机转矩百分比、电机转速、电机累计行程脉冲、转矩指令值、速度指令值、累计指令脉冲、电机电流、转子绝对位置、直线速 度、位置偏差脉冲、报警代码、输入输出端子信号状态等 |
编码器信号异常、IPM馍块过载保护、主回路过电压、主回路欠电压、电机过载、过电流、速度超差、制动过载、位置超差等 |
|
|
| EtherCAT 说明 |
| EtherCAT从站基本性能 |
| 通讯协议 |
支持服务 |
同步方式 |
物理层 |
波特率 |
双工方式 |
拓扑结构 |
传输媒介 |
传输距离 |
从站数 |
EtherCAT 帧长度 |
通讯误码率 |
| EtherCAT协议 |
CoE |
DC-分布式时钟 |
100BASE-TX |
100Mbit/s |
全双工 |
环型,线型 |
带屏蔽的超5类网线 |
两点小于 100M (环境良好) |
理论65535 |
44字节~1498字节 |
10月10日 |
|
|
| EtherCAT配置单元 |
| FMMU单元 |
存储同步管理器 |
过程数据RAM |
分布时钟 |
EEPEOM |
| 4个 |
4个 |
4KB |
64位 |
32Kbit |
|
|
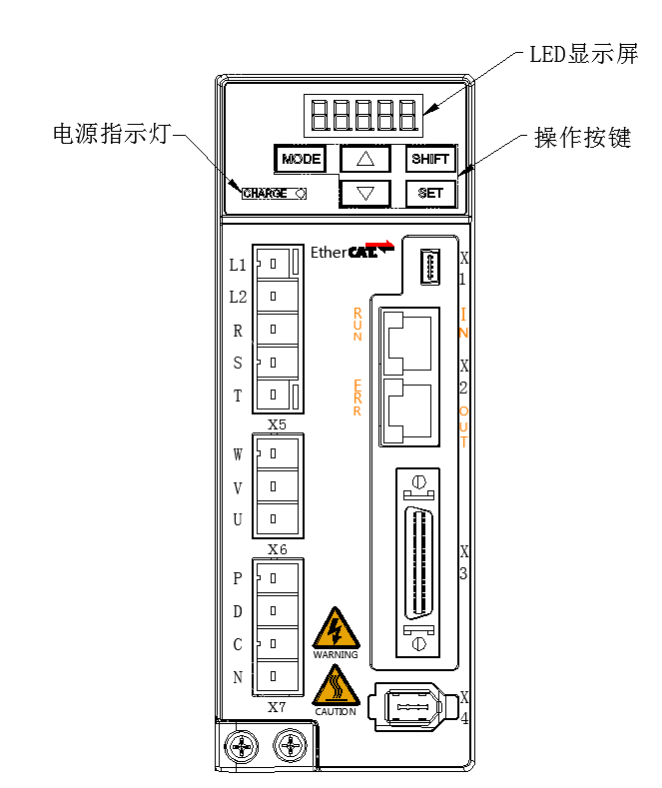
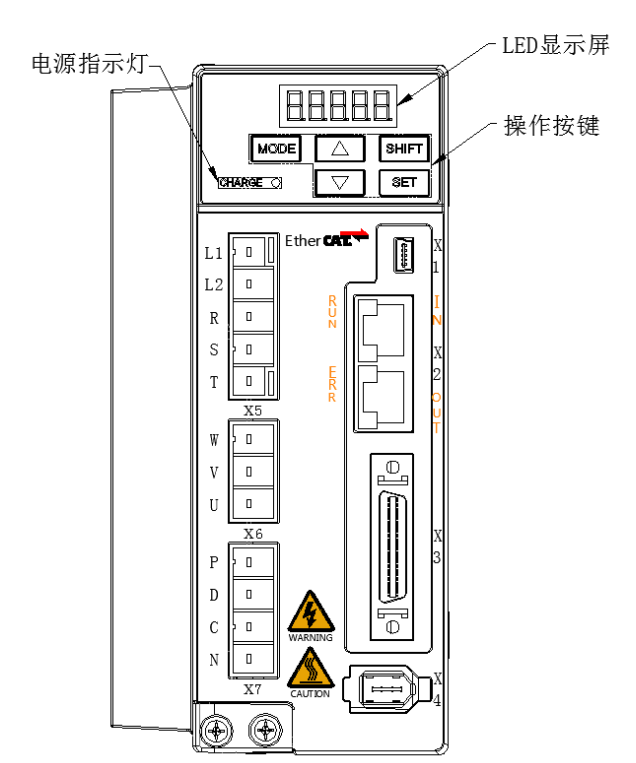
| 驱动器各接口名称及功能 |
| 端子记号 |
信号名称 |
说明 |
| R、S、T |
主回路电源输入端 |
220V级驱动器 |
接入单相或三相220V (50/60HZ) |
| L1、 L2 |
控制回路电源输入端 |
单相220V (50/60HZ) |
| U、V、W、 PE |
电机动力接口 |
U. V. W,为电机电源输入端子,PE为电机接地端子 |
| X2 |
总线通讯,串行通讯接口 |
总线通讯接口,支持CANOpen串行通讯接口,支持RS-232, RS-485 |
| X4 |
绝对式电机编码器接口 |
连接绝对式电机编码器反馈电缆 |
| X3 |
I/O信号接口 |
输入输出信号接口,连接至上位机 |
| C |
外接制动电阻端子 |
1、不使用外部制动电阻时,要将P和D之间短路连接,C和N不做任 何连接。2、使用外部制动电阻时,P和C之间加入外接制动电阻,D和N不做任 何连接 |
| P |
制动电阻公共端(连接 V-BUS电压正端) |
| D |
内置制动电阻端子 |
| N |
连接V_BUS电压负端 |
- |
|
| PE |
驱动器外壳接地端子 |
驱动器接地端子,该端子位于驱动器散热器上,共2个螺丝孔. |
| 注意事项:所有端子、插头必须保证接触良好并锁紧固定螺丝,否则会号致接触不良,引起伺服运行异常或故障。 |
|

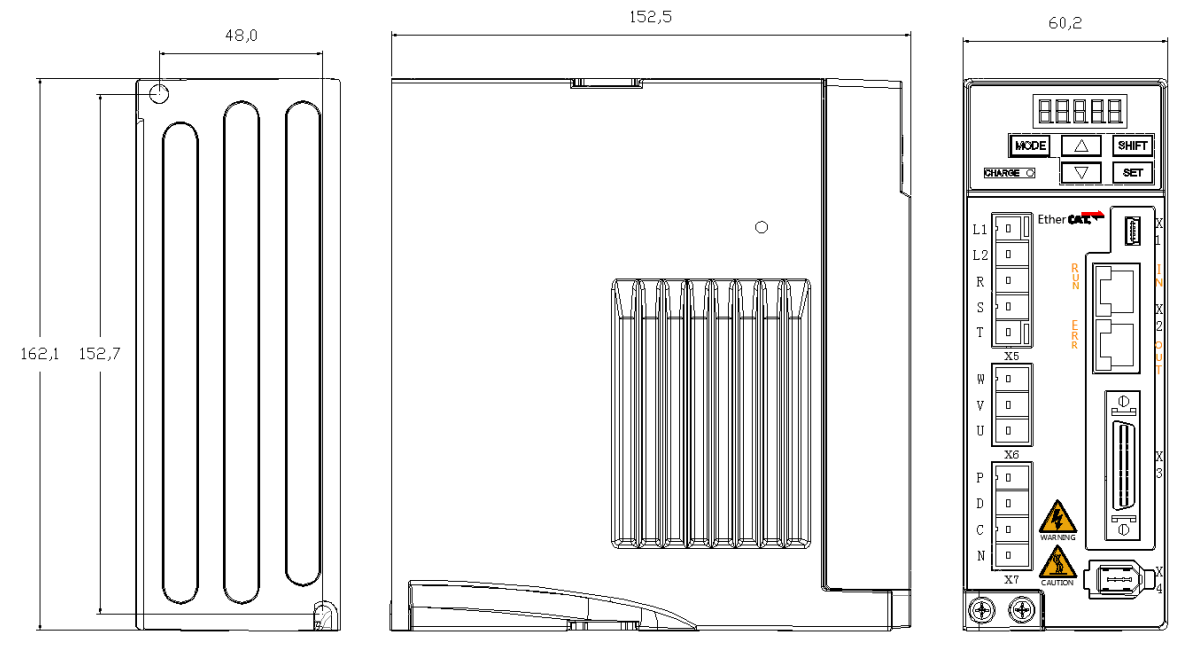
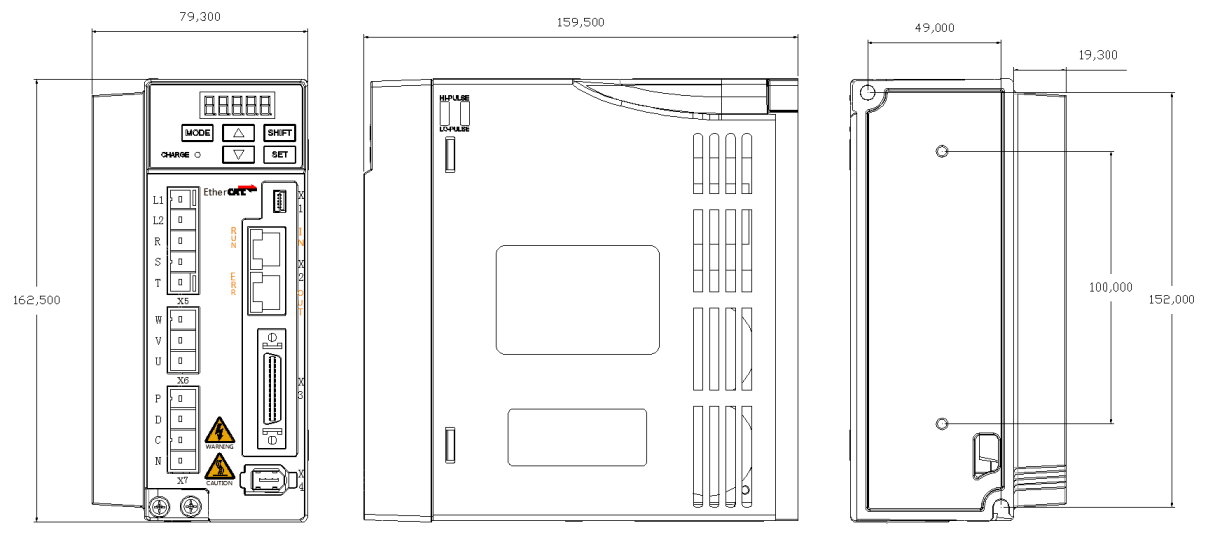
 型号规格
型号规格